Path Planning Robot with
Obstacle Avoidance Using
Image Processing
A fully custom-built omnidirectional robot that uses a ceiling-mounted camera and real-time computer vision to navigate autonomously from any start point to any goal — avoiding dynamic obstacles without turning its frame.
Project Overview
An Autonomous Robot That Sees From Above
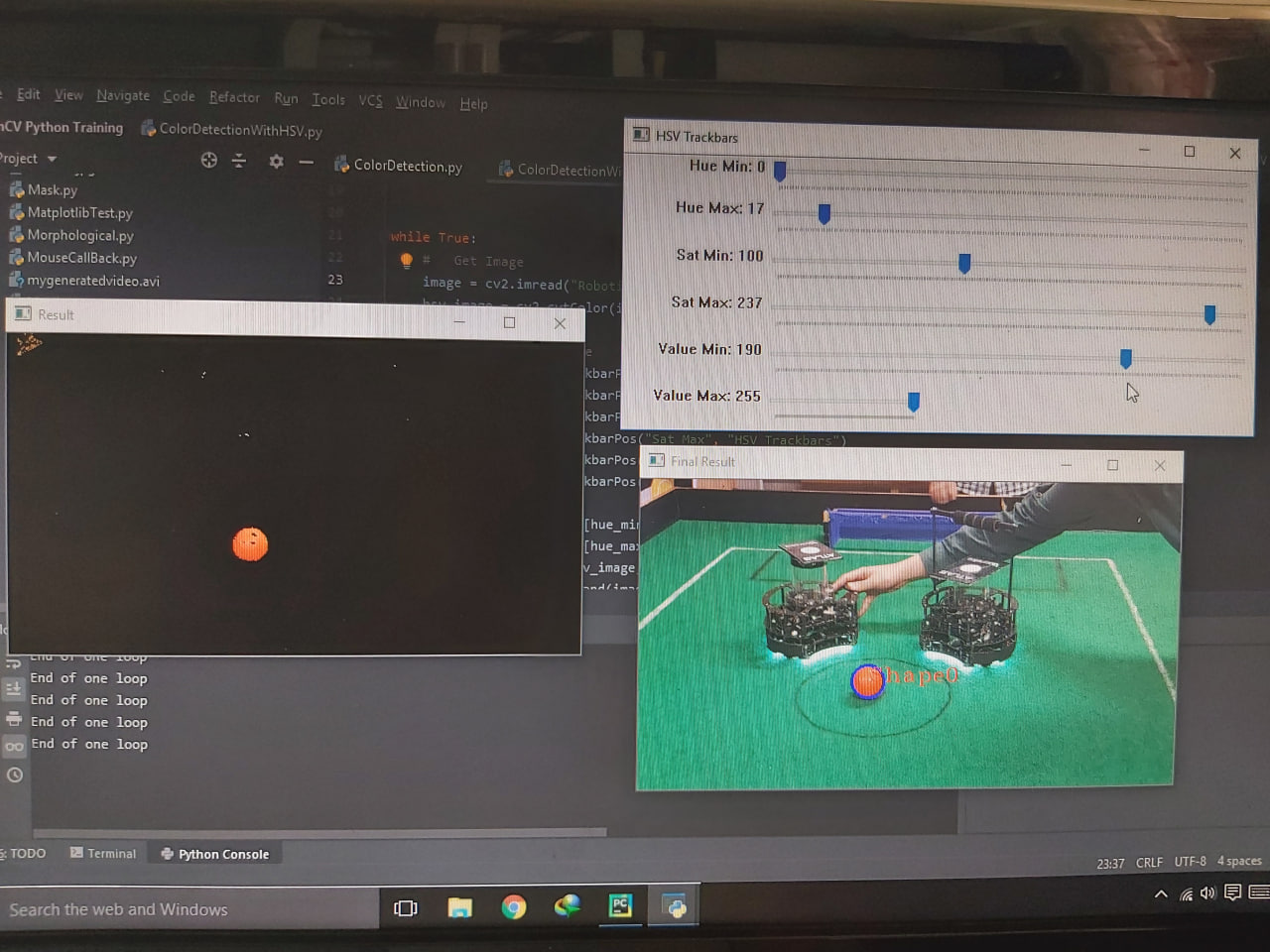
The goal of this project was to build a robot that uses a camera mounted near the ceiling to observe both itself and its environment, then uses image processing to determine an optimal path to a target destination — all while avoiding obstacles in its way.
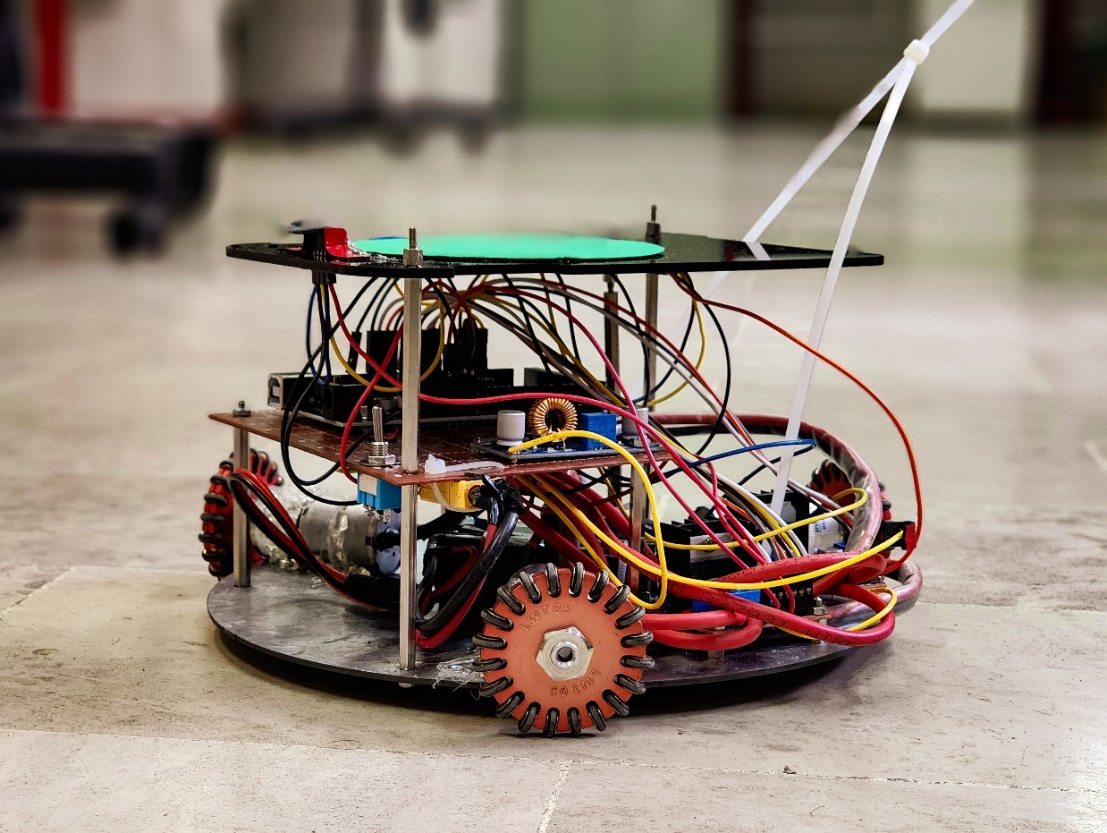
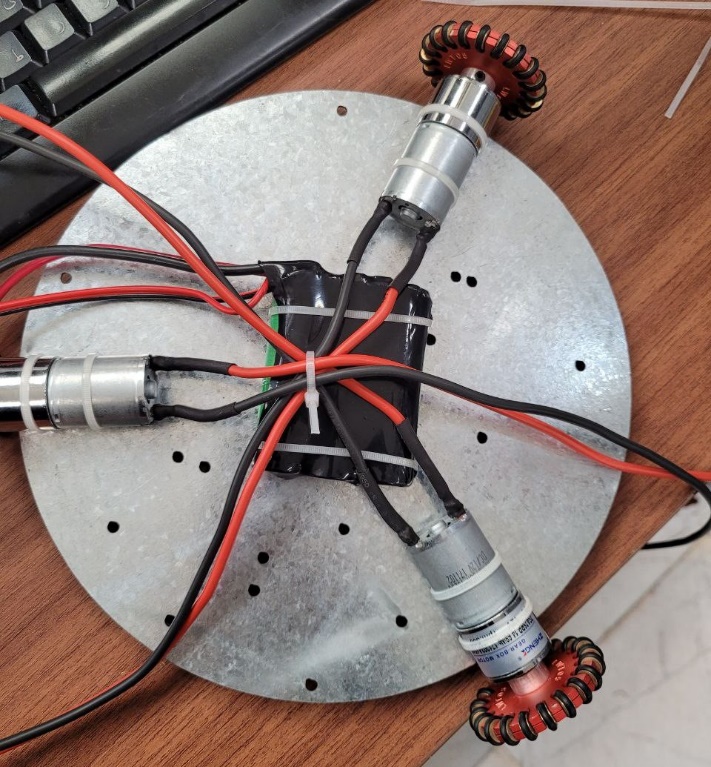
What makes this robot unique is its omnidirectional movement: using three mecanum wheels arranged at 120° intervals, the robot can move in any direction without rotating its body — a significant advantage in constrained environments.
Hardware
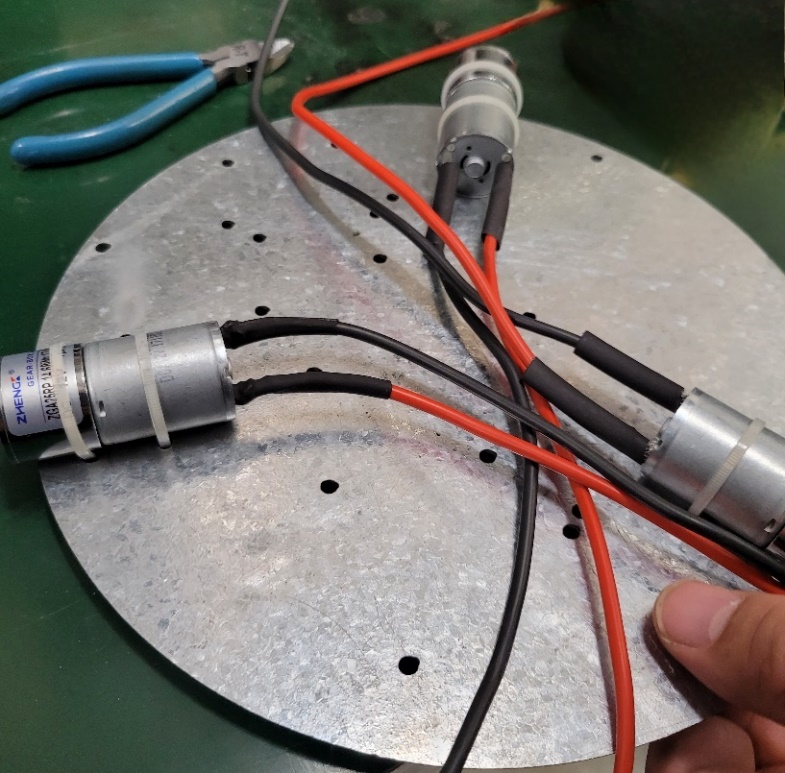
Robot Structure & Components
The robot was designed and assembled from scratch. Each subsystem — power, motion, sensing, and computation — was carefully selected and integrated.


Intelligence
Path Planning Algorithm
Tangent-Based Obstacle Avoidance
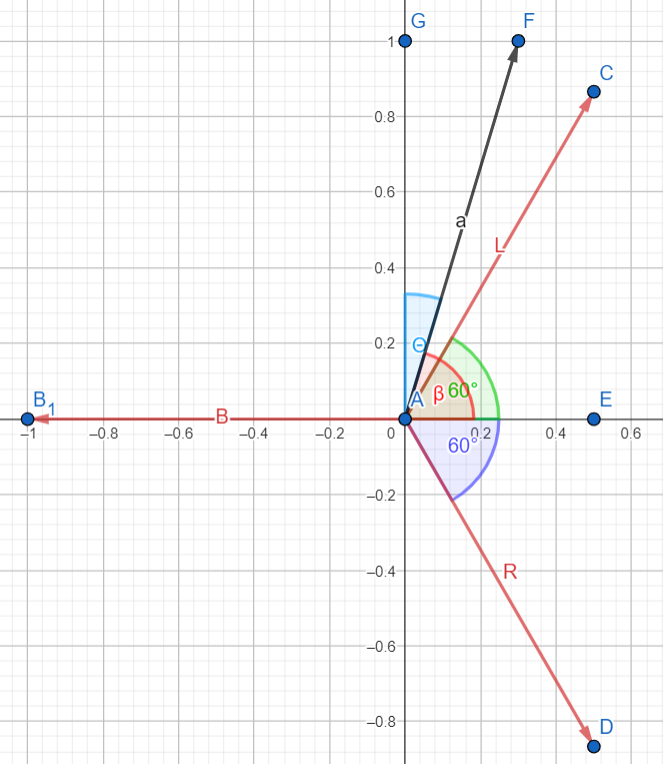
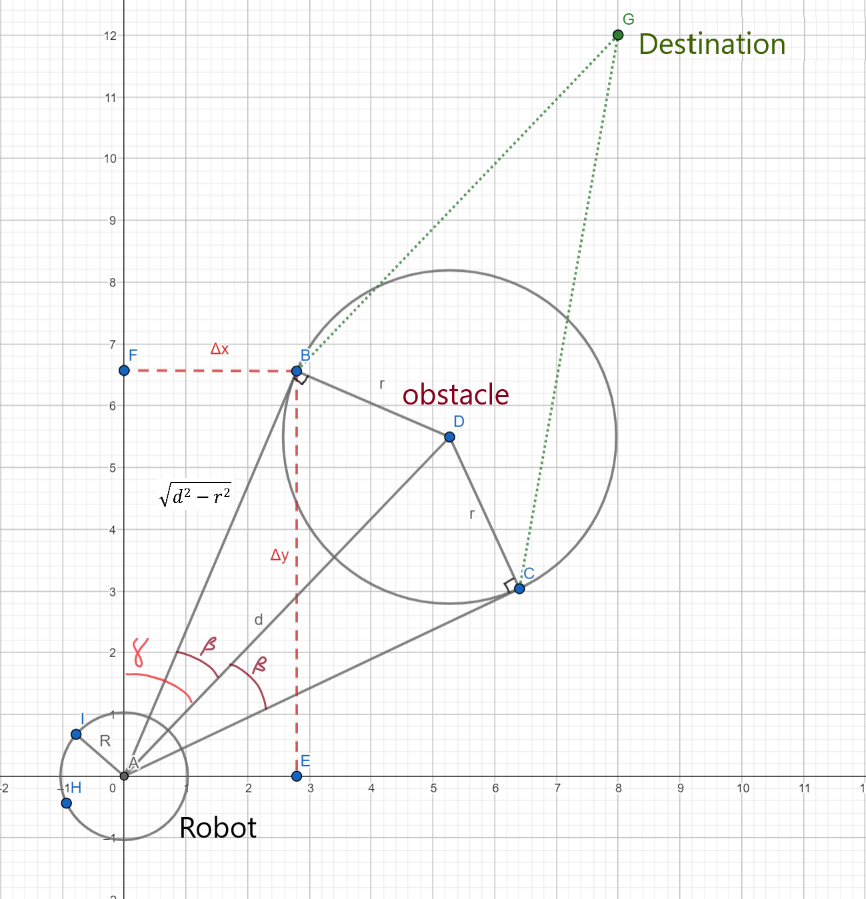
When a straight-line path from the robot to the destination intersects an obstacle (modeled as a circle), the algorithm computes the two tangent lines from the robot's current position to the obstacle's bounding circle.
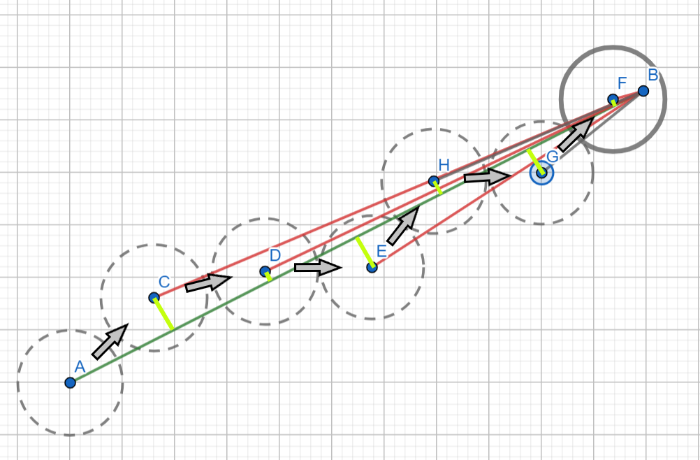
The shorter tangent path is selected, directing the robot to graze the edge of the obstacle and then re-aim toward the destination. This process repeats iteratively as the robot moves, handling multiple sequential obstacles.
The result: smooth, efficient trajectories that avoid collisions without requiring pre-mapped environments — purely reactive based on the live camera feed.
Implementation
System Pipeline
// PID# define Zarib_P 0.15# define Zarib_I 0.00001# define Zarib_D 0.0015
Evaluation
Testing & Results
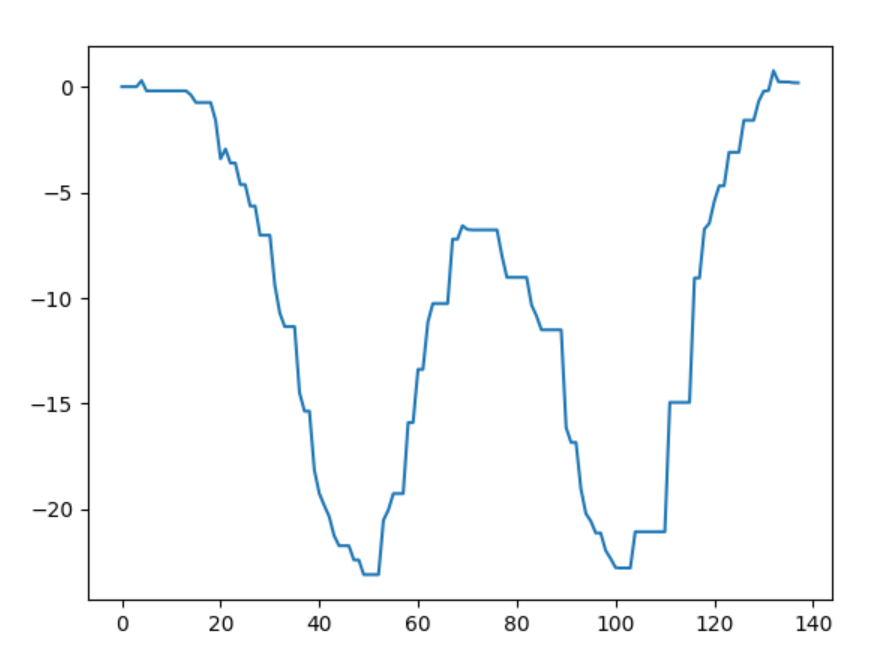
The robot was evaluated across multiple motion directions. Position error was measured over the course of each run to quantify accuracy and stability.
- ✓ Successfully navigated to target while avoiding single and multiple obstacles
- ✓ Omnidirectional movement achieved without frame rotation
- ✓ PID control reduced oscillation and maintained stable trajectories
- ✓ Real-time processing at camera frame rates with no significant delay
- → Motor angle error quantified across 4 movement directions
- → Dynamic obstacle tracking with Kalman filtering
- → Onboard computation (Raspberry Pi) for fully autonomous operation
- → Deep learning-based obstacle detection replacing HSV heuristics
Gallery
Build Process